引言:自动驾驶是复杂的系统中的系统,在实现SAE定义的L1至L5级自动驾驶的过程中,仍有诸多挑战需要投入大量研发精力与成本解决。而作为万物互联时代重要一环,它却是博世研发战略的重中之重,在2019“第四次工业革命”分赛场,博世物联网黑客马拉松中,自动驾驶这一主题将作为赛题的重要组成部分为博世寻找物联网人才,本文就让我们就来一探博世自动驾驶研发思路与发展战略。
积极转型,自主研发
一年前,戴姆勒与博世联合研发的“自动代客泊车技术”首次在中国亮相——通过使用智能手机应用和安装于停车场的智能传感器基础设施连接,使用者能够让他们的车辆从停车场落客区自动行驶直至停放至其指定车位,或远程召唤爱车从指定车位自动行驶至上客区。这项全新的技术将让传统手动停车成为历史,帮助驾车者节省停车时间,为车主带来更多便捷。

自动代客泊车技术可为停车场和车主提供的更高效的解决方案。配备智能基础设施的停车场,可减少停车间距以提升约20%的停车容量。
2018年自动代客泊车技术的展示,体现了博世为向“智能交通出行服务供应商”转型付出的努力。而事实上,作为智能交通重要应用场景之一的“自动驾驶”也一直是博世集团的投资重点。目前,约有4,000名博世工程师正在从事自动驾驶的研发工作。博世集团董事会主席沃尔克马尔·邓纳尔博士曾在2018年集团业绩媒体沟通会上表示,“预计到2022年,博世在自动驾驶领域的前期投入将达到40亿欧元。”
作为博世集团最大的业务部门,汽车与智能交通技术业务部在2017年的销售总额达474亿欧元,占集团总销售额的61%,使博世成为全球最大的汽车部件供应商之一。汽车与智能交通技术业务部致力于打造零事故、零排放、零担忧的未来交通愿景,该业务部融合了集团在自动化、电气化和互联化三大前沿领域的专业技术。而在技术的研发上,博世采取双元发展战略:一方面专注于开发L1级驾驶员辅助系统,以此快速拓展帮助私家车实现L2及L3级别的部分及有条件的自动驾驶,另一方面,也即将于2020年代初在部分地区开始部署L4及L5级别的无人驾驶技术。
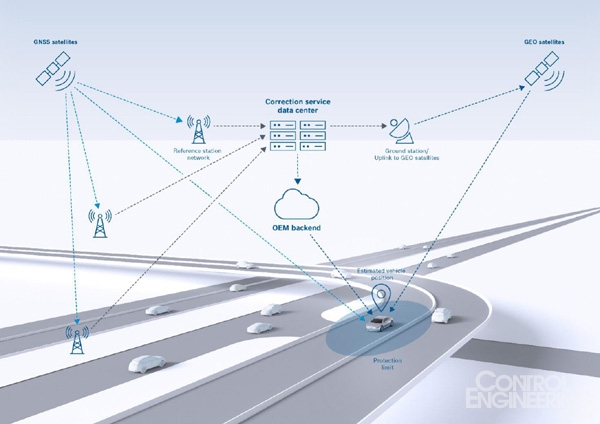
自动驾驶技术的成熟终将改变每个人的出行方式——整个汽车行业向自动化、电气化、互联化发展的大趋势已不可逆转,然而由于其包含了感知、定位、决策和执行等多个环节,仍然是复杂系统中的系统,而“安全”则是自动驾驶的根本。为实现“零事故”交通愿景,博世在自动驾驶关键技术环节强调冗余的必要性,尤其是对于自动驾驶车辆的安全性而言至关重要的“定位解决方案”——只有时刻知晓接近厘米级的自身准确位置,自动驾驶车辆才能安全行驶。为此,博世在全球范围内提供先进的定位整体打包方案,这套方案集成硬件、软件与服务,为自动驾驶车辆精确定位提供冗余系统。

自动驾驶,安全为本
在硬件层面,博世已开发用于自动驾驶车辆精确定位的卫星定位智能传感器。新型的传感器内置高性能的全球导航卫星系统(GNSS)信号接收器,来自GNSS的信号能够帮助车辆确定自己的绝对位置。然而,仅凭这些信息仍不足以满足自动驾驶车辆对于精确定位的要求,必须借助智能软件进行数据处理才能可靠地知晓自动驾驶车辆在几米范围内的确切行进路径,以此推算车辆的行驶动作,从而实现车辆的精确定位。
自动驾驶车辆主要基于纠偏过的GNSS信号进行定位,当失去卫星信号(如车辆进入隧道)时,卫星定位智能传感器信号在数秒内仍然有效。这就涉及到根据上一个绝对位置可知点计算车辆的当前位置。但如果GNSS信号长时间中断,卫星定位智能传感器无法确定车辆位置,再智能的算法也无济于事。这时,自动驾驶车辆就可以通过道路特征获取定位信息。
“博世道路特征”就是基于高精地图和车载环境感知传感器的“定位服务”,该服务与博世卫星定位智能传感器共同构成博世自动驾驶定位解决方案,有助于提高自动驾驶车辆的安全性。配备在车上的摄像头与雷达通过识别道路周围的环境特征——如车道线、交通信号灯和护栏等,生成“博世道路特征”。
不同于单一依靠摄像头的定位方案,雷达传感器的极大优势在于,即使是在昏暗或能见度低的路况下也可识别道路特征,且探测范围更广。通过车载通讯模块,这些道路特征信息将被传输至云端服务器。上传到云端服务器的道路特征信息将被使用并生成独立的传感器定位层,并最终由图商集成为高精度地图的一部分。自动驾驶车辆通过车载环境感知传感器获得的道路特征信息,如道路标识、护栏等,实时与高精地图定位层进行比对,使得车辆能够准确知晓自己在当前车道中的位置,从而实现厘米级定位。 同时,具有高运算力且低功耗的域控制器会为解决复杂场景的决策系统提供支持,最后冗余的执行机构为保驾护航。
可普及的自动泊车方案
自动驾驶是复杂的系统中的系统。在实现SAE定义的L1至L5级自动驾驶的过程中,仍有非常多的挑战需要投入大量研发精力与成本去解决。这样的复杂程度,使得行业的自动驾驶路线图日趋理性。而前文路径,我们将其统称为“单车智能”——即车辆的智能程度是以车辆本身传感器及算法为基础的。在此领域,博世拥有基于感知、定位、决策、执行等自动驾驶关键技术环节的多年研发及量产经验。
2015年中国国务院发布的“中国制造2025”,使智能网联汽车首次被提升到国家战略的高度,智能网联不仅包含智能的车,同时包含智能的路。通过车路协同,降低部分车辆的智能程度,从而降低使用成本与系统复杂程度,有助于尽早实现产业化应用。
博世同时关注这一领域,博世智能网联事业部打造的AVP自动代客泊车系统,不依靠任何车载自动驾驶传感器和计算单元,而是感知和计算能力全部都布置在停车场内。工作时,停车场内的传感器会对停车场的路况进行全局感知,随后再由停车场内的计算设备计算出车辆的行驶轨迹和驾驶指令,进而再通过WIFI等网络将指令发给汽车,由车辆的线控系统完成加减速和转向操作。
基于基础设施的感知和决策,博世自动代客泊车(AVP)解决方案允许驾驶员将车辆停放在下车区域,而后车辆将自动驾驶到停车位,实现自动代客停车。从驾驶员角度出发,当其想要取车时,汽车将自动返回取车区,驾驶员可以再次接管车辆的控制并驶离停车场。从停车场角度出发,基于基础设施的AVP技术提供实时的全局监控,可以看到停车场的每一个死角,有效地提高了安全性。同时,AVP为车辆有序分配停车位,形成了更高效的停车场管理。从成本角度出发,由于车辆不需要为感知和决策添加额外的硬件,极大地降低了车辆的成本。此外,AVP还为车库提供增值服务,如车辆清洗和充电等,使未来的停车库完全自动化。
在博世集团与戴姆勒合作的自动泊车中,通过引入车联和云端的互联,车辆可凭借自身力量找到车位,将驾驶员彻底从泊车中解放出来。
本次黑客马拉松赛题围绕自动驾驶实时数据的高压缩解码(自动驾驶)及数字化室内车库,实现互联停车与与自动路径规划停车。(智能网联)展开
关于“第四次工业革命”黑客马拉松:
DoraHacks“第四次工业革命” 黑客马拉松,即将于2019年7月19日至21日在北京朝阳规划艺术馆举办。在3天的时间里,参赛者们将有机会在以“物联网”、“智慧城市”、“人工智能”、“未来移动通信”、“自动驾驶”、“区块链”等以“第四次工业革命”代表性技术的赛道上角逐高下、碰撞思想,探索“医疗健康”、“慈善”、“环境保护”、“社会创新”、“前沿技术落地”等技术应用主题,赢取多种大赛奖励,共同解决“第四次工业革命”中最受关注且亟待解决的真实行业问题。大赛将包括但不局限于以下赛道:
●微软加速器分赛场(AI for GOOD,office365 现代工作模式,Surface移动创新方案)
●博世分赛场(物联网:智慧交通、智能网联、智能制造、物联感知、智能楼宇)
●微众银行分会场 (区块链:探索实践)
●商汤科技分赛场(AI:计算机视觉)
●Binance分赛场(区块链:慈善、密码学)
●NEO分赛场(公链:Dapp开发)
●星创高速赛题(设计:汽车废件再设计)
●中移(成都)产业研究院分赛场(5G技术落地)
●rct studio分赛场(DL/ML/VR/3D游戏开发/内容创作






